【新型RAV4】世界初*1ダイナミックトルクベクタリングAWDについて語る
新型RAV4がかっこよすぎたので早速ディーラーへ行き展示車をみせてもらいました。
女性の営業の人に説明を聞いたら
「世界初の機構で4WDなのにとっても燃費が良いんです!!!!」
といかにも最近、講習で勉強してきた知識を披露していただいたので私も勉強を兼ねてダイナミックトルクベクタリングAWDを記事にしていきたいと思います。
目次
ダイナミックトルクベクタリングAWDとは

マルチインフォメーションディスプレイ表示
高い走破性・操縦安定性と燃費向上を両立する新4WDシステム。
ダイナミックトルクベクタリングAWD世界初*1
RAV4のために、世界に先駆け「ダイナミックトルクベクタリングAWD」を開発しました。走行状況に応じ、前後トルク配分に加えて後輪トルクを左右独立で制御し、旋回時の車両安定性を高める「トルクベクタリング機構」、4輪駆動が不要な時にはプロペラシャフト前後で動力伝達を切断し燃費向上を図る「ディスコネクト機構」を採用。各輪へのトルク配分状況は、マルチインフォメーションディスプレイで確認できます。
簡単に説明をすると4WDなんだけど走行状況に応じて2WDと4WDを自動で切り替えます!!ってのは当たり前笑。さらに後輪の左右ででパワーの調整もやってのけてしまう優れもの!!っていうものです。
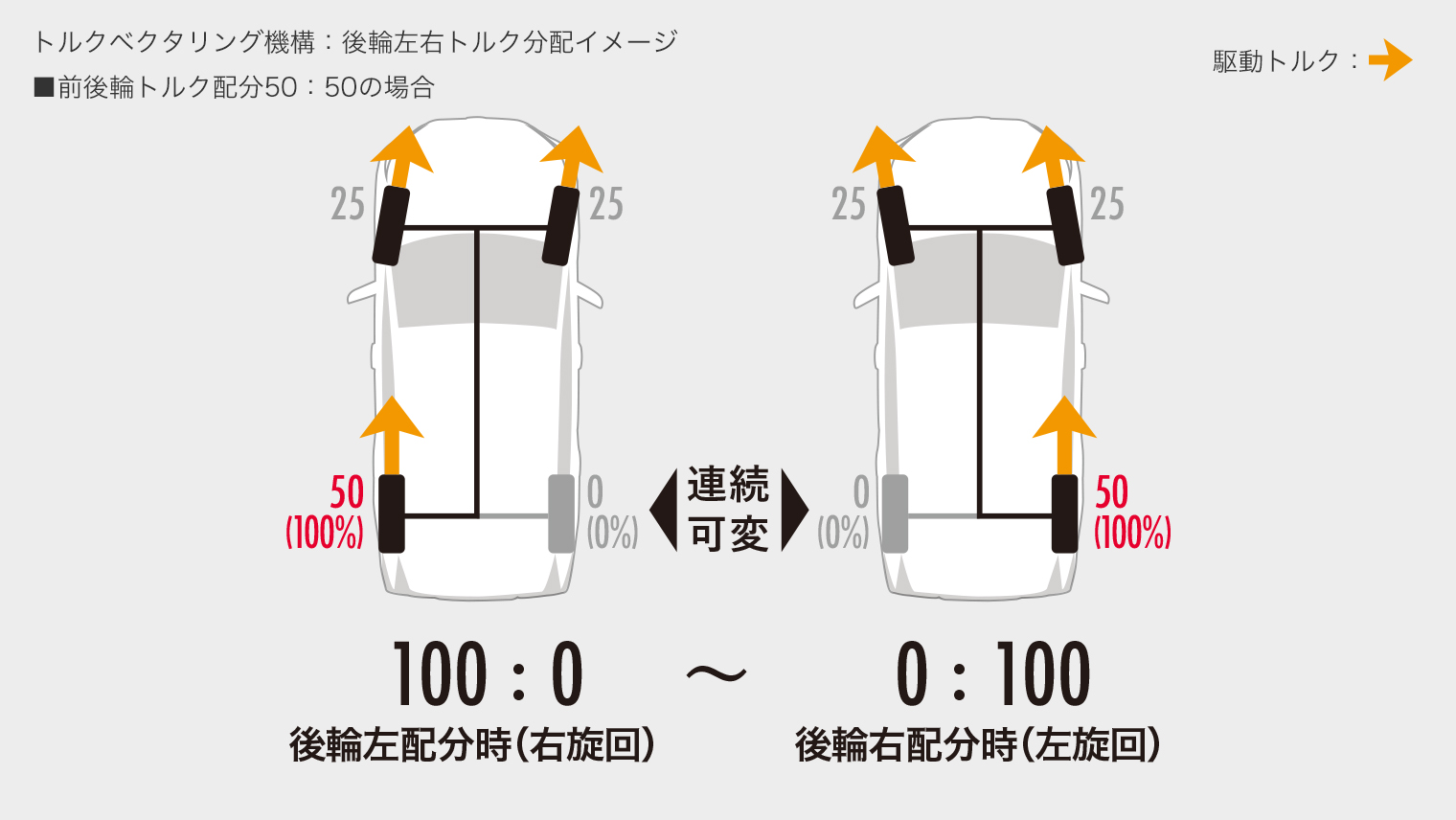
後輪の左右トルク制御を実現。安定した姿勢で、思い通りに曲がる。
POINT 01[トルクベクタリング機構]
ステアリングを切り始めた瞬間から、前後輪にトルクを最適に配分すると同時に、後輪のトルクを左右それぞれで独立制御。旋回時には、ドライバーが思い描くターゲットラインを的確に捉え、安定した車両姿勢で駆け抜けることができます。またエンジンのパワーを余すところなく路面に伝えることで、力強い走りを実現しています。
世界初はこれや!!
世界初の後ろに*1となっているのをお気づきでしょうか?
ダイナミックトルクベクタリングAWDの構造が世界初ではないのです。たしかハリアーなんかも採用されていた気がします(違ってたらすまん)
*1の説明を読むと
「*1前後ラチェットシフト式ドグクラッチで切断するディスコネクト機構を採用。2019年4月現在、トヨタ自動車(株)調べ」
ダイナミックトルクベクタリングAWDの中の前後ラチェットシフト式ドグクラッチで切断するディスコネクト機構ってのが世界初だったんですね^^;
さてこいつはいったいなんだ??
スポンサーリンク
前後ラチェットシフト式ドグクラッチで切断するディスコネクト機構とは?
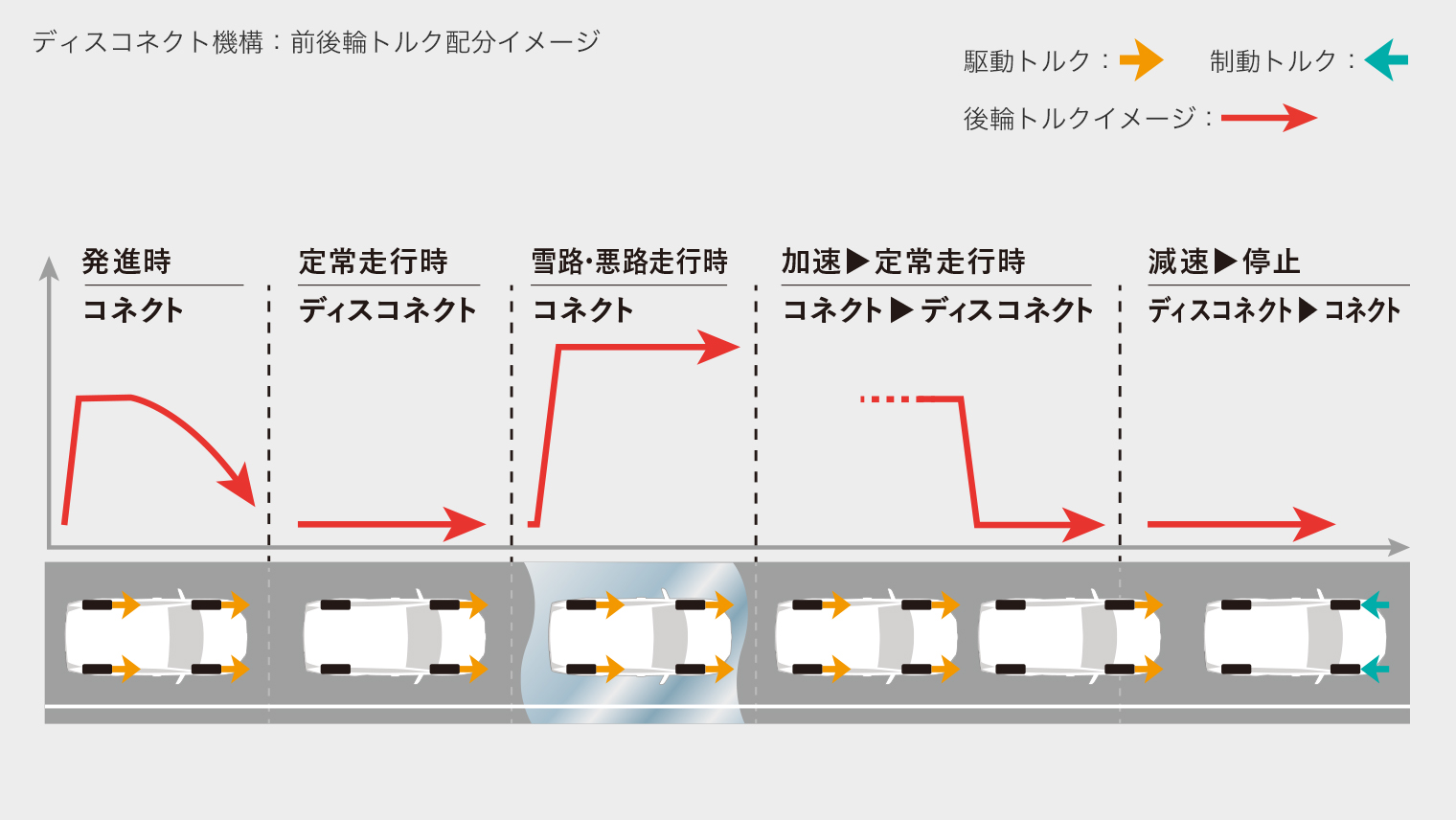
2WD走行のシーンでは、後輪への余分な動力伝達を瞬時に停止。燃費性能を高める。
POINT 02[ディスコネクト機構]
前後輪の車輪同軸上に「ラチェットシフト式ドグクラッチ」を採用しました。定常走行時などの2WD走行時には、後輪に動力を伝達させる駆動系をドグクラッチで切り離し(ディスコネクト)、駆動系の回転を瞬時に停止。動力の損失を大幅に低減し、燃費性能を向上させます。4WD性能が必要な状況になると素早く、コネクト状態となり、4WD走行へと切り替わります。
簡単に言うと2WD走行時に瞬時にプロペラシャフトより後ろをフリーにする機構ってことです。よって無駄がなくなり燃費がよくなりまっせ!!
コネクト=接続状態
ディスコネクト=遮断状態
むつかしく言う4WDリニアソレノイドFR、カム、ボール、ホルダ、ピストン、スリーブで構成されていてピストンとホルダとカムが~~みたいな話になるのですが私自身もうまく説明できないので割愛します!!
燃費はどや?
WLTCモードでの燃料消費率は
2WDで15.8km/L(G)
4WDで15.2km/L(G)
その差0、6km/L
ちなみに前の型のRAV4の場合は(10・15モード燃費)
2WDで13.4km/L(G)
4WDで12.6km/L(G)
その差0.8km/L
最近のトヨタ車も2WDと4WDの燃費差がだいたい0.8km/L前後の差がある為若干は良くなっているのかなぁと思います。
うーーん燃費がよくなってますねぇ☆
まとめ
RAV4がかっこよすぎたので世界初の機構を語ってみました。
ただRAV4にはハイブリット車もありハイブリット車の4WDにはE-Four(電気式4WDシステム)なるシステムもありますが別の機会があれば語りたいと思います。
RAV4カッケーーー!!!
RAV4を買うためにはまず査定を♪